 Geometric Red-Teaming
Geometric Red-Teaming
Abstract
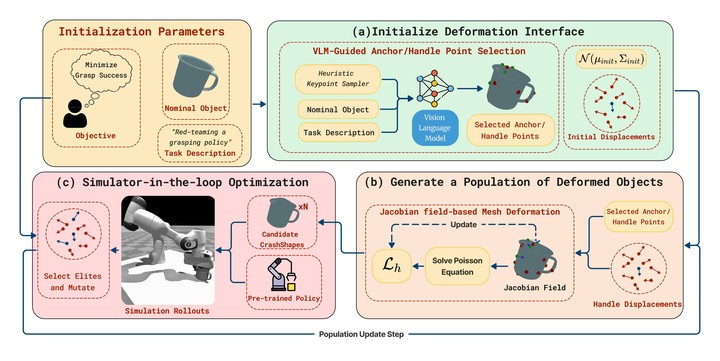
Standard evaluation protocols in robotic manipulation typically assess policy performance over curated, in-distribution test sets, offering limited insight into how systems fail under plausible variation. We introduce Geometric Red-Teaming (GRT), a red-teaming framework that probes robustness through object-centric geometric perturbations, automatically generating CrashShapes – structurally valid, user-constrained mesh deformations that trigger catastrophic failures in pre-trained manipulation policies. The method integrates a Jacobian field-based deformation model with a gradient-free, simulator-in-the-loop optimization strategy. Across insertion, articulation, and grasping tasks, GRT consistently discovers deformations that collapse policy performance, revealing brittle failure modes missed by static benchmarks. By combining task-level policy rollouts with constraint-aware shape exploration, we aim to build a general purpose framework for structured, object-centric robustness evaluation in robotic manipulation. We additionally show that fine-tuning on individual CrashShapes, a process we refer to as blue-teaming, improves task success by up to 60 percentage points on those shapes, while preserving performance on the original object, demonstrating the utility of red-teamed geometries for targeted policy refinement. Finally, we validate both red-teaming and blue-teaming results with a real robotic arm, observing that simulated CrashShapes reduce task success from 90% to as low as 22.5%, and that blue-teaming recovers performance to up to 90% on the corresponding real-world geometry – closely matching simulation outcomes.
Divyam Goel
My research interests are in 3D computer vision, and robot learning.